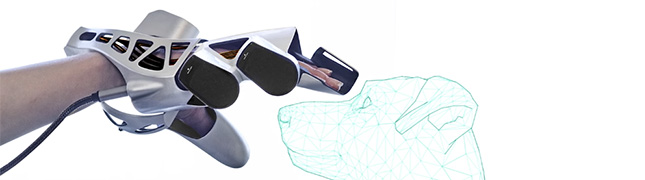
The Japanese company Exiii is developing a mechanical exoskeleton for our hands in order to be able to manipulate objects in the virtual world.
The next interface for the virtual world, thus defines Exiii to his new haptic device shaped like a mechanical exoskeleton. Exos it allows us to touch and pick up virtual objects with our hands, using an internal motor that sends a reactive force to the user’s finger, creating the real sensation of grabbing them. The mechanism of the exoskeleton makes it possible to exhibit the right amount of force and the right angles of articulation to achieve the effect. The device has four joints with which we can perform the basic squeezing and grasping movements.
https://www.youtube.com/watch?v=nSyrhQ5ojaU
According to Exiii, the device serves to expand the functionality available in virtual worlds, as well as its use in the remote control of robots or in rehabilitation programs based on hand movements. At the moment the company has not commented on its plans for the Exos project, just let’s stay tuned.